ok I know fuse teh majority of the job done by the collision system,
- Untitled.png (29.21 KiB) Viewed 9235 times
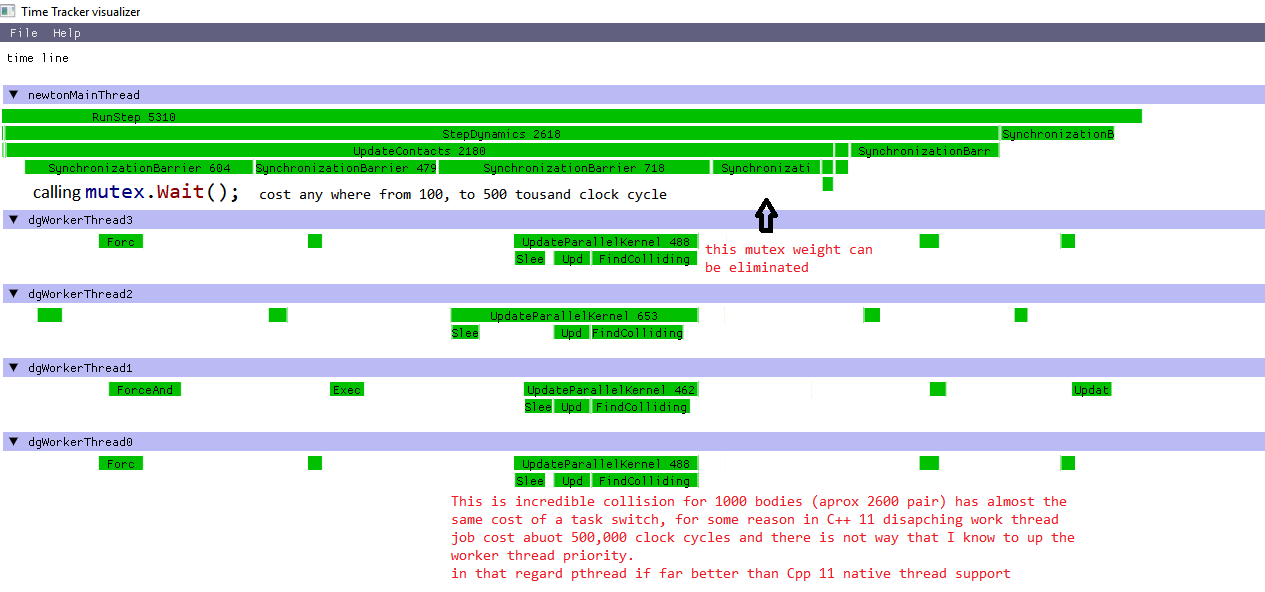
as you can see there are fewer task switches, and teh entire collsion cost about the same as a task switch, I am very disappointed of c++ 11 native thread support,
they do no allow for setting the thread prioristy as a result the respon of a worker thread is a random vamdon time for 100, top abpout 500,000 clock cycles.
threfore if you have many workld thread is very much gurantee that it will be abpout 500, 000 clock wast.
I kind of what to re enable pthread support, is lower level and and work thread respond is almos instantanes for hiegher priorithread.
afte I am done wit ethe final toaches I will try to re enable pthread, many make it optional onle I can find out a way to set a thread priority. becaus eoteh that that a newton update will continue to be 0.5 ms even when doing nothing.


