A place to discuss everything related to Newton Dynamics.
Moderators: Sascha Willems, walaber
 by Nearga » Tue Sep 02, 2008 2:13 pm
by Nearga » Tue Sep 02, 2008 2:13 pm
okay, so firstly i add information about shapes of different objects
- Code: Select all
NewtonCollision *newton_addcollision(ENTITY* entity, VECTOR* diff)
{
if(!entity) return;
NewtonCollision* collision;
int vertices = ent_vertices(entity);
float *vertexcloud = (float*)malloc(sizeof(float) * vertices * 3);
int i;
for(i = 0; i < vertices; i++)
{
VECTOR vertex; vec_for_mesh(&vertex, entity, i + 1);
vertexcloud[i * 3 + 0] = diff.x * QUANTTOMETER + (vertex.x) * entity->scale_x * QUANTTOMETER;
vertexcloud[i * 3 + 1] = diff.y * QUANTTOMETER + (vertex.y) * entity->scale_y * QUANTTOMETER;
vertexcloud[i * 3 + 2] = diff.z * QUANTTOMETER + (vertex.z) * entity->scale_z * QUANTTOMETER;
}
collision = NewtonCreateConvexHull(nworld, vertices, vertexcloud, 12, 0.01, NULL);
free(vertexcloud);
return collision;
}
next step is to collect all collision to one body
- Code: Select all
function AddToCompound(int comp, ENTITY* ent, float mass, int part, int total_parts)
{
if (part==0)
{
CompMainEnt=ent;
compoundParts[0] = newton_addcollision(me, nullvector);
}
else
{
compoundParts[part] = newton_addcollision(me, vector(my.x - CompMainEnt.x,my.y - CompMainEnt.y,my.z - CompMainEnt.z));
}
if (part==0) {
wait(1);
NewtonCollision* collision = NewtonCreateCompoundCollision (nworld, total_parts, compoundParts);
int i;
for (i = 0; i < total_parts; i++) { NewtonReleaseCollision (nworld, compoundParts[i]); }
NewtonBody* body = NewtonCreateBody(nworld, collision);
float m[16]; ent_getmatrix_rb(my, m);
NewtonBodySetMatrix(body, m);
my.skill99 = body; // save body pointer with entity
NewtonBodySetUserData(body, my); // save entity pointer with body
NewtonBodySetTransformCallback(body, onsettransform);
NewtonBodySetDestructorCallback(body, onsetdestructor);
NewtonBodySetForceAndTorqueCallback(body, onforceandtorque);
float inertia[3];
float centerofmass[3];
NewtonConvexCollisionCalculateInertialMatrix(collision, inertia, centerofmass);
NewtonBodySetMassMatrix(body, mass, mass * inertia[0], mass * inertia[1], mass * inertia[2]);
NewtonReleaseCollision(nworld, collision);
}
}
and after this just adds entity to compound shape
- Code: Select all
action Compound_pt3()
{
wait(3);
AddToCompound(1,me,75,2,3);
}
action Compound_pt2()
{
wait(3);
AddToCompound(1,me,75,1,3);
}
action Compound_pt1()
{
CompMainEnt=me;
// CompoundControl();
wait(3);
// vec_diff(
AddToCompound(1,me,75,0,3);
}
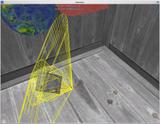
everything looking work fine, but the main problem is that colition ingores entitie's direction

and

moving of the graphics entities isnt a problem, direction is a trouble... i also tried to rotate vertexcloud from newton_addcollision like
- Code: Select all
vec_rotate(vector(vertexcloud[i * 3 + 0],vertexcloud[i * 3 + 1],vertexcloud[i * 3 + 2]),entity.pan);
vec_rotate(vector(vertexcloud[i * 3 + 0],vertexcloud[i * 3 + 1],vertexcloud[i * 3 + 2]),entity.tilt);
vec_rotate(vector(vertexcloud[i * 3 + 0],vertexcloud[i * 3 + 1],vertexcloud[i * 3 + 2]),entity.roll);
but i didnt get anything usefull

btw, maybe NewtonConvexHullModifierSetMatrix() can help me?
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by JernejL » Tue Sep 02, 2008 3:23 pm
You can't apply transformation to compound object pieces themselves, the collision pieces should have transformation already set (offset matrix), you can also use a convex hull which is already created offsetted and transformed properly from object origin when making the hull, you cannot set the offset matrix for collision after you create it, so be sure it is correct before you create it.
NewtonConvexHullModifierSetMatrix is related to convex hull modifier (not compound object).
-

JernejL
-
- Posts: 1578
- Joined: Mon Dec 06, 2004 2:00 pm
- Location: Slovenia
-
by Nearga » Tue Sep 02, 2008 4:49 pm
convex hull which is already created offsetted and transformed properly from object origin when making the hull
hm, i already use convex hull, but why i get something like from screenshots above, if they are transformed?
i tried
- Code: Select all
NewtonCollision *newton_addcollision(ENTITY* entity, VECTOR* diff)
{
if(!entity) return;
NewtonCollision* collision;
int vertices = ent_vertices(entity);
float *vertexcloud = (float*)malloc(sizeof(float) * vertices * 3);
int i;
for(i = 0; i < vertices; i++)
{
VECTOR vertex; vec_for_mesh(&vertex, entity, i + 1);
vertexcloud[i * 3 + 0] = diff.x * QUANTTOMETER + (vertex.x) * entity->scale_x * QUANTTOMETER;
vertexcloud[i * 3 + 1] = diff.y * QUANTTOMETER + (vertex.y) * entity->scale_y * QUANTTOMETER;
vertexcloud[i * 3 + 2] = diff.z * QUANTTOMETER + (vertex.z) * entity->scale_z * QUANTTOMETER;
vec_rotate(vector(vertexcloud[i * 3 + 0],vertexcloud[i * 3 + 1],vertexcloud[i * 3 + 2]),entity.pan);
vec_rotate(vector(vertexcloud[i * 3 + 0],vertexcloud[i * 3 + 1],vertexcloud[i * 3 + 2]),entity.tilt);
vec_rotate(vector(vertexcloud[i * 3 + 0],vertexcloud[i * 3 + 1],vertexcloud[i * 3 + 2]),entity.roll);
}
collision = NewtonCreateConvexHull(nworld, vertices, vertexcloud, 12, 0.01, NULL);
free(vertexcloud);
return collision;
}
but i get something horrible like
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by JernejL » Tue Sep 02, 2008 5:14 pm
the matrix transformations must be wrong then, i built huge advanced compound meshes with 1000s of pieces without any problems.
-
JernejL
-
- Posts: 1578
- Joined: Mon Dec 06, 2004 2:00 pm
- Location: Slovenia
-
by Nearga » Tue Sep 02, 2008 5:19 pm
and were your pieces turned in different directions?
hm, also i notice that direction of all parts depens of direction of entity, from wich i create body...
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by JernejL » Tue Sep 02, 2008 6:05 pm
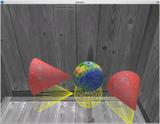
No, mine weren't, but neither are yours since you create a convex hull out of your points, you transform them yourself, so your points must be sent wrong to newton (i see you pass a null pointer for offset matrix).
Here is example newton compound mesh from my project, it works perfectly:

-
JernejL
-
- Posts: 1578
- Joined: Mon Dec 06, 2004 2:00 pm
- Location: Slovenia
-
by Nearga » Tue Sep 02, 2008 6:29 pm
hm, okay, i changed script, but result is the same(moffset used good for other primitives like balls or boxes, but not for compounds, i dont know why)
- Code: Select all
NewtonCollision *newton_addcollision(ENTITY* entity, VECTOR* diff)
{
if(!entity) return;
NewtonCollision* collision;
VECTOR vmin; vec_for_min(&vmin, entity);
VECTOR vmax; vec_for_max(&vmax, entity);
vmin.x *= entity.scale_x; vmin.y *= entity.scale_y; vmin.z *= entity.scale_z;
vmax.x *= entity.scale_x; vmax.y *= entity.scale_y; vmax.z *= entity.scale_z;
D3DXMATRIX moffset; // offset from center of bounding box to coordinate origin of entity
D3DXMatrixTranslation(&moffset, (vmin.x + (vmax.x - vmin.x) / 2.0) * QUANTTOMETER,
(vmin.y + (vmax.y - vmin.y) / 2.0) * QUANTTOMETER,
(vmin.z + (vmax.z - vmin.z) / 2.0) * QUANTTOMETER);
int vertices = ent_vertices(entity);
float *vertexcloud = (float*)malloc(sizeof(float) * vertices * 3);
int i;
for(i = 0; i < vertices; i++)
{
VECTOR vertex; vec_for_mesh(&vertex, entity, i + 1);
vertexcloud[i * 3 + 0] = diff.x * QUANTTOMETER + (vertex.x) * entity->scale_x * QUANTTOMETER;
vertexcloud[i * 3 + 1] = diff.y * QUANTTOMETER + (vertex.y) * entity->scale_y * QUANTTOMETER;
vertexcloud[i * 3 + 2] = diff.z * QUANTTOMETER + (vertex.z) * entity->scale_z * QUANTTOMETER;
}
collision = NewtonCreateConvexHull(nworld, vertices, vertexcloud, 12, 0.01, &moffset);
free(vertexcloud);
return collision;
}
also, cant you, please rotate one part of your ship's compound just for test?
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by JernejL » Tue Sep 02, 2008 6:36 pm
parts of the ship can not rotate, collisions objects in compound stay as they are once they are part of the compound.
-
JernejL
-
- Posts: 1578
- Joined: Mon Dec 06, 2004 2:00 pm
- Location: Slovenia
-
by Nearga » Tue Sep 02, 2008 6:38 pm
i made it

))))))
Delfi, thank you very much for help, i just must rotate vertex vector before equalaiting to vertexcloud:)
here is working example
- Code: Select all
NewtonCollision *newton_addcollision(ENTITY* entity, VECTOR* diff)
{
if(!entity) return;
NewtonCollision* collision;
int vertices = ent_vertices(entity);
float *vertexcloud = (float*)malloc(sizeof(float) * vertices * 3);
int i;
for(i = 0; i < vertices; i++)
{
VECTOR vertex; vec_for_mesh(&vertex, entity, i + 1);
vec_rotate(vertex,entity.pan);
vertexcloud[i * 3 + 0] = diff.x * QUANTTOMETER + (vertex.x) * entity->scale_x * QUANTTOMETER;
vertexcloud[i * 3 + 1] = diff.y * QUANTTOMETER + (vertex.y) * entity->scale_y * QUANTTOMETER;
vertexcloud[i * 3 + 2] = diff.z * QUANTTOMETER + (vertex.z) * entity->scale_z * QUANTTOMETER;
}
collision = NewtonCreateConvexHull(nworld, vertices, vertexcloud, 12, 0.01, NULL);
free(vertexcloud);
return collision;
}
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by Nearga » Tue Sep 02, 2008 6:39 pm
Delfi wrote:parts of the ship can not rotate, collisions objects in compound stay as they are once they are part of the compound.
yes, i meaned to rotate one of the part before you finish constructing compound(like i rotate second cone)
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by JernejL » Tue Sep 02, 2008 6:56 pm
if you do not rotate yours, do they end up OK? in that case, your transformation routines are broken, try setting offsetmatrix instead.
-
JernejL
-
- Posts: 1578
- Joined: Mon Dec 06, 2004 2:00 pm
- Location: Slovenia
-
by Nearga » Tue Sep 02, 2008 7:19 pm
yes, everything now works fine:
1) i rotate entity as i wish and then
2) i add it to compound shape and all that entities are falling and reacting like one body, as it may be
one more time thank you
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by Nearga » Tue Sep 02, 2008 7:28 pm
i think that offset matrix don't need because vec_for_mesh returns local coordinate of every vertex in mesh... problem was i forgot to rotate mesh(or, if to say more exactly, every vertex of mesh) in direction that i need..
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by Nearga » Wed Sep 03, 2008 10:56 am
hmm... looking like its not the end... the center of mass isn't on its place...

looking like
- Code: Select all
float inertia[3];
float centerofmass[3];
NewtonConvexCollisionCalculateInertialMatrix(collision, inertia, centerofmass);
NewtonBodySetMassMatrix(bodyCC, CompM, CompM * inertia[0], CompM * inertia[1], CompM * inertia[2]);
dont work normally or whar?
-
Nearga
-
- Posts: 21
- Joined: Thu Jul 31, 2008 11:47 am
by JernejL » Wed Sep 03, 2008 12:30 pm
Inertial and Mass matrix DO NOT set the centre of mass.
see: NewtonBodySetCentreOfMass
-
JernejL
-
- Posts: 1578
- Joined: Mon Dec 06, 2004 2:00 pm
- Location: Slovenia
-
Return to General Discussion
Who is online
Users browsing this forum: No registered users and 2 guests




